|
|
|
|
 Research Abstract
Research Abstract
|
|
|
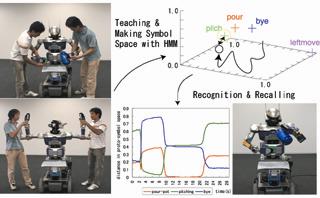
For behavior acquisition and situation recognition, it is one of the most important functions
for intelligent robots to memorize and abstract sequential data of motion and various sensors.
In this research, we propose a method for achieving behavior teaching, situation recognition,
behavior evocation and generation of unlearned behavior by abstracting time series data from
various sensors and acquiring symbols of behavior. As an implementation, we performed an
experiment to teach behavior to a humanoid robot HRP-2W by directly moving his hands and
let him evocate behavior.
|
|
|
|
|
Movie
|
|
- Behavior acquisition and evocation[mpg]
|
|
|
References
|
|
- Tetsunari Inamura, Naoki Kojo, Tomoyuki Sonoda, Kazuyuki Sakamoto, Kei Okada and Masayuki Inaba: "Intent Imitation using Wearable Motion Capturing System with On-line Teaching of Task Attention," International Conference on Humanoid Robots, 2005. (accepted)
- Naoki Kojo, Tetsunari Inamura and Masayuki Inaba: "Behavior Induction by Geometric Relation between Symbols of Multi-sensory Pattern," Proc. of 9th International Conference on Autonomous Intelligent Systems, 2006. (accepted)
- Naoki Kojo, Tetsunari Inamura, Tomoyuki Sonoda, Kei Okada, and Masayuki Inaba,
"On-line behavior acquisition and induction based on symbolization of time-series multi-sensory pattern",
The 23rd Annual Conference of the Robotics Society of Japan,
pp.1D21, 2005.[pdf] (in Japnese)
|