|
|
|
|
 研究概要
研究概要
|
|
|
ロボットが未知環境における自己位置推定とマップ作成を同時に行う手法を総称してSLAM(Simultaneous Localization and Mapping) と呼び, 昨今ロボットの分野において主要な研究課題の一つとなっている.
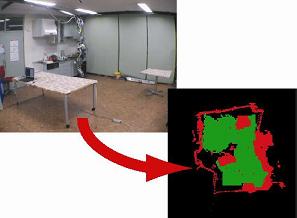
本研究では, レーザーレンジファインダとステレオビジョンの双方の利点を組み合わせたSLAM の手法を提案する. まず, ロボットの自己位置推定を精度が高いレーザーレンジファインダによって行う. そして, 3 次元環境を観測できるステレオビジョンでマップを作成し, 位置合わせする. マップ作成は, ステレオビジョンによって復元されたデータの中から地面の領域を抽出することによって行う. これにより, ロボットの行動生成に有用な, ロボットが進入可能な領域と進入不能な領域の双方の情報を持つマップの作成が可能である.
また, 提案手法をレーザーレンジファインダとステレオビジョンの双方を持つ半身ヒューマノイドロボットHRP-2W に実装し, 環境認識実験を行った.
|
|
|
|
|
ムービー(準備中)
|
|
|
|
|
|
参考文献
|
|
- 畑尾 直孝,古城 直樹,岡田 慧,稲邑 哲也,稲葉 雅幸. レーザー距離計による位置推定とステレオ視による平面検出を用いた3次元マップ作成システム. 第23回日本ロボット学会学術講演会講演論文集. pp. 3B17, 2005.
|

 までお願いします。
までお願いします。