|
|
|
|
 Research Summary
Research Summary
|
|
|
Simultaneous Localization and Mapping (SLAM) is a term used to describe the ability for robots to simultaneously create a map of an unknown environment and determine its own location in real-time. SLAM has become an essential research topic in the current field of robotics.
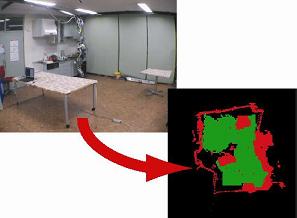
At our laboratory, we propose combining the advantages of laser-range finding and stereovision to implement SLAM in robots. Laser-range finders allow the robot to pinpoint its exact location with high accuracy. Stereovision then allows the robot to create a three-dimensional map of its environment and find its position within that map. Extracting from the data retrieved through the robot's stereovision, the robot can determine the boundaries of the ground of the environment. This creates a map with defined boundaries for where a robot can and cannot enter, essential in the robot's motion planning.
We are currently conducting experiments on environment mapping using this combined system of laser-range finding and stereovision, with our upper-body humanoid robot HRP-2W.
|
|
|
|
|
Movies (Under construction)
|
|
- Creating a three-dimensional map
|
|
|
References
|
|
- Naotaka HATAO, Naoki KOJO, Kei OKADA, Tetsunari INAMURA, Masayuki INABA:
Generation System of 3D Environment Map using a LRF and a Stereo Vision,
in The 23rd Annual Conference on Robotics Society of Japan, 3B17, 2005
|